Introduction
What is NIMS-OS?
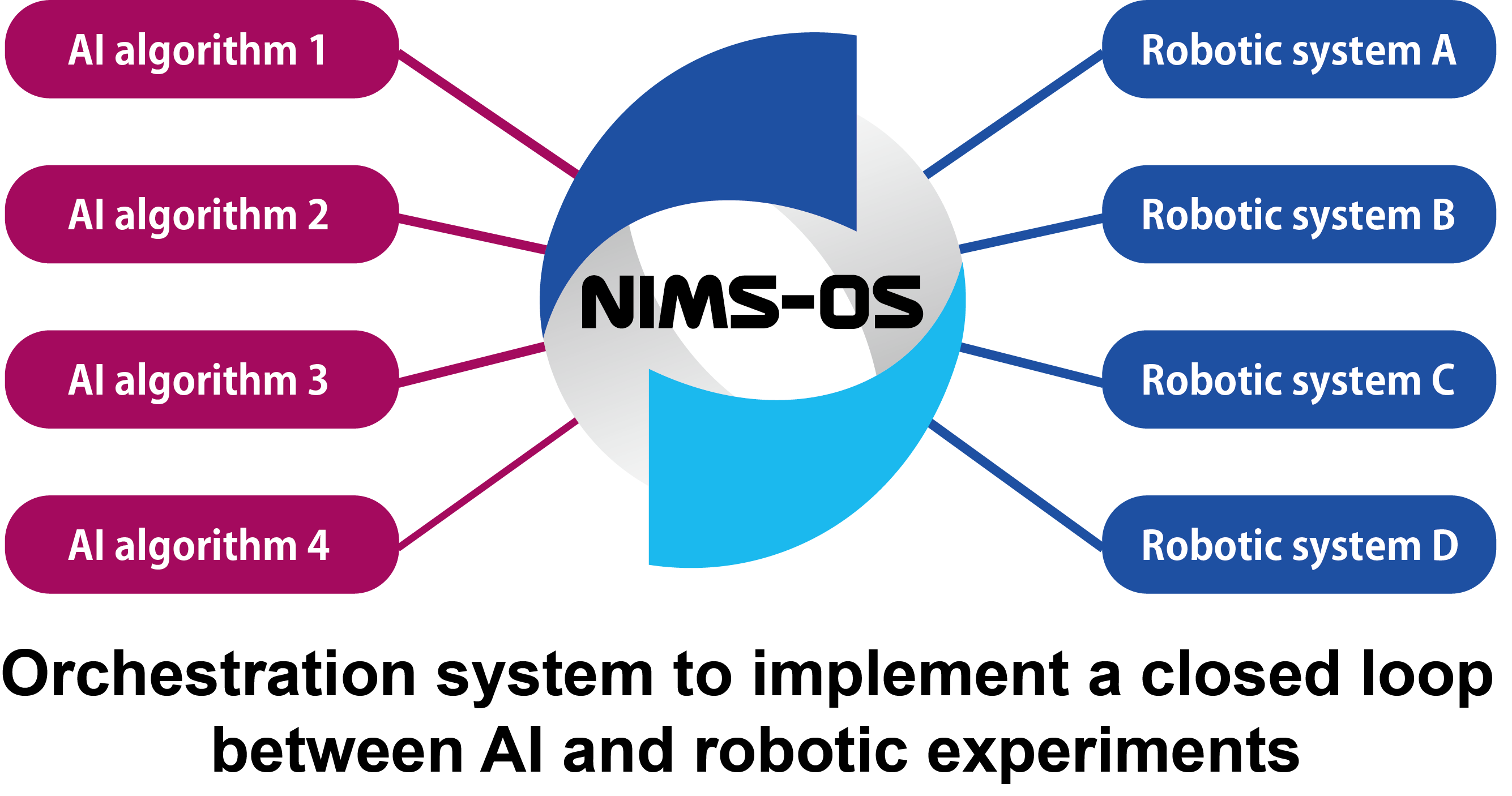
NIMS-OS (NIMS Orchestration System) is a Python library to realize a closed loop of robotic experiments and artificial intelligence without human intervention for automated materials exploration. NIMS-OS can perform automated materials exploration in various combinations by considering artificial intelligence and robotic experiments as modules (see the figure below). As artificial intelligence technique for materials science, Bayesian optimization method (PHYSBO), boundLess objective-free exploration method (BLOX), phase diagram construction method (PDC), and random exploration (RE) can be used. NIMS Automated Robotic Electrochemical Experiments (NAREE) system is available as robotic experiments. Visualization tools for the results are also included, allowing users to check optimization results in real time. Newly created modules for artificial intelligence and robotic experiments can be added and used. More modules will be added in the future. In addition, the GUI application to control NIMS-OS is developed and opened.
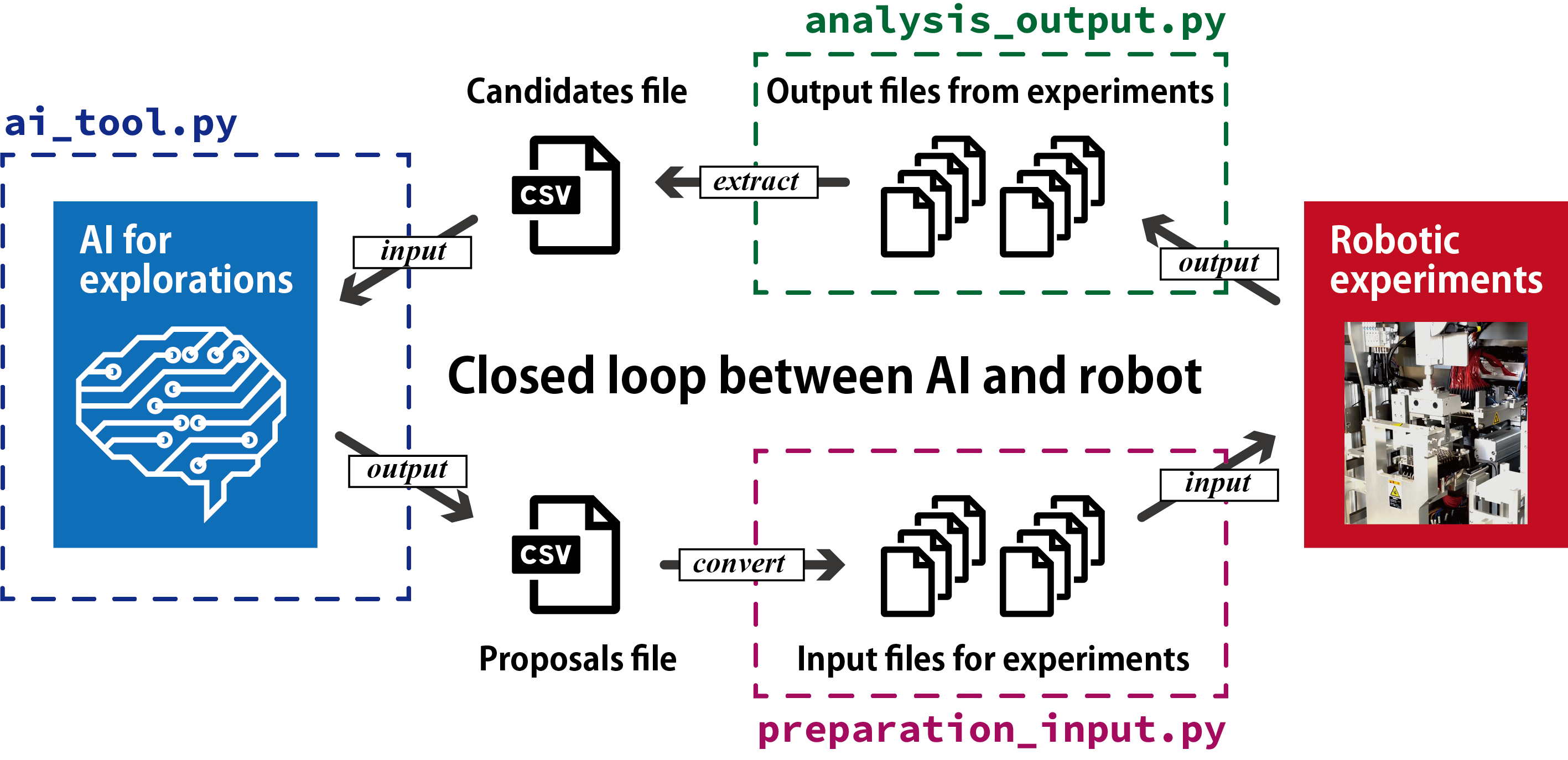
In NIMS-OS, three types of Python scripts form a closed loop, as shown in the figure below.
ai_tool.py: From thecandidates file, which lists candidate experimental conditions, the AI selects the preferred experimental conditions and outputs them to theproposal file.preparation_input.py: This script creates input files for the robotics experiment fromproposal fileand starts the robotics experiments. Some parts of this Python script will need to be revised depending on the robotics device to be used.analysis_output.py: This script receives a signal from the robotic experiments when it is finished, extracts the objective functions from the results of the experiment, and updates thecandidadates file. Some parts of this Python script will need to be revised depending on the robotics device to be used.
Citation
When using NIMS-OS, please cite the following reference:
Ryo Tamura, Koji Tsuda, and Shoichi Matsuda, NIMS-OS: A software achieving a closed loop between artificial intelligence and robotic experiments in materials science, arXiv:2304.13927. Available from https://arxiv.org/abs/2304.13927.
Main developers
Ryo Tamura (NIMS, U. Tokyo)
Shoichi Matsuda(NIMS)
Koji Tsuda(U. Tokyo, NIMS)
ForDx, Inc.
FURUKAWA ELECTRIC ADVANCED ENGINEERING CO.,LTD.
License
The program package and the complete source code of this software are distributed under the MIT License.